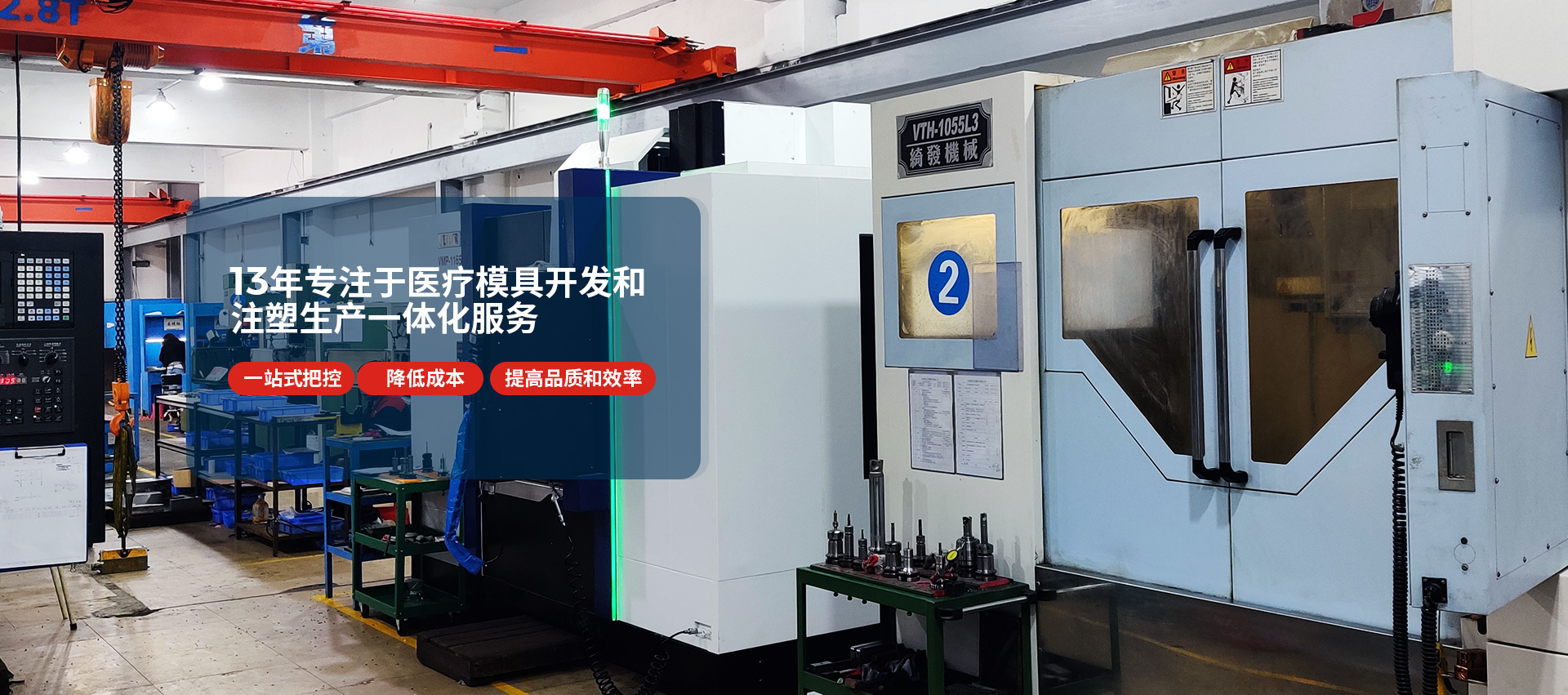
13年专注于医疗模式开发
和注塑生产一体化服务
-
手机:
-
电话:
0755-2904 1235
-
邮箱:
sales@kaierwo.com
-
地址:
深圳市光明区公明街道马山头第六工业区3号整栋
手机:
电话:
邮箱:
地址:
凯尔沃集产品结构思维、研发、生产技术能力,满足提高模具开发进度和降低生产成本的需要
凯尔沃秉承“客户第一”的经营理念,注重品质与效率,助力客户更好的竞争市场!





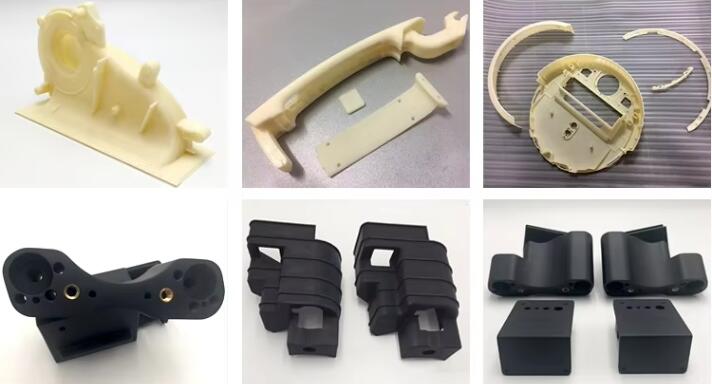
凯尔沃成立于2011年,工厂位于中国深圳市光明区,厂房面积8000平方米,是一家生产+销售为一体的工贸企业。13年专注于医疗模具开发和注塑生产一体化服务,已获得高新技术企业认定、ISO9001:2015 和 ISO13485:2016体系认证。秉承“诚信敬业,客户第一”的核心经营服务理念,拥有高效的生产管理流程和机制集经验丰富的团队60+人,先进的CNC和注塑设备40+台,精密的检测仪器等一系列辅助设备 经营服务项目涵盖医疗器械外壳、医疗耗材、透明产品的模具设计和开发,普通注塑和无尘注塑长期合作客户的分布在中国、新加坡、日本、加拿大、美国等欧州国家我们坚持以满足客户的需求为第一,为客户提供最精益和敏捷的生产解决方案!
注塑模具经验
厂房面积
专业团队
注塑机
客户好评
凯尔沃模具 · 13年工厂 值得信任



关注凯尔沃,了解更多行业资讯
机器人外壳模具的主要种类及应用有哪些?在机器人产业化发展的进程中,外壳模具是实现机器人外壳规模化量产的核心装备,直接决定外壳的成型精度、外观质感、结构强度与生产效率。机器人外壳形态多样,涵盖工业机器...
2026-02-26
医用器械与器具的种类及核心特点是什么?医用器械与器具,作为现代医疗体系的重要组成部分,是用于诊断、治疗、监护、预防疾病及康复的专业设备。它们广泛应用于医院、诊所、家庭护理及公共卫生领域,其技术水平与...
2026-02-23
医疗产品模具的特点与作用是什么?医疗产品模具是医疗设备量产的核心载体,不同于普通工业模具,其设计与制造需严格契合医疗行业的严谨性、安全性要求,既要保障产品精度与一致性,又要符合医用级合规标准。作为连...
2026-01-22
机器人手板制作工艺流程是什么?机器人手板制作作为机器人研发的关键环节,其工艺流程的严谨性和精密性直接关系到产品设计的验证效果和后续开发的效率。这个高度专业化的制造过程,融合了现代加工技术、材料科学和...
2026-01-16
医疗模具与普通模具有什么区别?在现代制造业的分类体系中,医疗模具因其特殊的产品用途和质量要求,形成了一个独立的技术分支。这些差异不仅体现在材料选择和制造工艺上,更深刻地反映在设计理念、质量标准和监管体...
2025-12-30
快速模具制造技术是什么?在现代制造业的发展进程中,快速模具制造技术已成为连接产品设计与批量生产的重要桥梁。这项技术通过创新的制造方法和材料应用,大幅缩短了传统模具的开发周期,为企业在激烈的市场竞争中赢...
2025-12-18
塑胶制品加工定制流程是什么?在现代制造业中,塑胶制品以其优异的性能和灵活的设计自由度,成为各行业产品开发的重要选择。一套完整的塑胶制品加工定制流程,不仅能够确保产品质量,更能有效控制成本、缩短开发周...
2025-11-26
塑胶外壳开模注塑 塑胶外壳开模注塑方法有哪些?在现代制造业中,塑胶外壳因其轻量化、设计自由度高等优势,成为各类产品的首选外壳方案。而开模注塑作为塑胶外壳生产的核心工艺,其技术方法的选择直接影响着产品质...
2025-11-18
医疗模具开模要求?医疗模具开模流程是什么?在医疗器械制造领域,模具开制不仅关乎产品质量,更直接关系到患者的生命健康。医疗模具因其特殊的使用环境和功能要求,在开模过程中有着比其他行业更为严格和特殊的要求...
2025-10-23
服务机器人模具有哪些?服务机器人模具功能特点!在服务机器人产业快速发展的今天,模具作为量产的关键装备,其技术水平直接影响着产品的质量、成本和市场竞争力。从迎宾机器人到医疗辅助机器人,从清洁机器人到配送...
2025-10-17
塑胶零件加工定制方案,在医疗器械、消费电子、汽车零部件等精密制造领域,塑胶零件的加工定制已成为产品创新的核心环节。一套完善的定制方案需涵盖材料选择、结构设计、模具开发、生产验证及质量管控五大维度,以...
2025-09-26
简易模具是什么?简易模具与正式模具的区别?在产品研发和小批量生产领域,简易模具(又称快速模具、软模)作为一种高效灵活的制造解决方案,正发挥着越来越重要的作用。它与正式模具共同构成了现代制造业中不可或缺...
2025-09-18
医疗产品模具的特点与功能解析一、医疗产品模具概述医疗产品模具是用于生产医疗器械、医疗耗材及医疗包装等产品的专用模具,其制造的产品广泛应用于手术、诊断、治疗、护理等领域。由于医疗行业的特殊性,医疗模具相...
2025-07-30
医疗模具是指用于生产医疗器械、医疗耗材及相关医疗产品的专用模具,其产品广泛应用于诊断、治疗、手术、护理等医疗领域。与普通工业模具相比,医疗模具具有更高的精度要求、更严格的质量标准和更复杂的卫生规范。随着医疗技术的不断进步和人们对健康需求的日益增长,医疗模具行业正面临着前所未有的发展机遇与挑战。
2025-07-30
精密医疗模具作为医疗器械制造的核心工具,其分类体系与技术特性直接决定了产品的临床性能与安全性。根据成型工艺、应用场景及材料特性,精密医疗模具可划分为以下四大类,每类模具均承载着特定的技术要求与临床价值。一、按成型工艺分类:技术路径决定产品形态注塑模具通过冷/热流道系统实现复杂结构精密成型,广泛应用于心脏起搏器外壳、胰岛素注射笔组件等高精度部件。例如,采用多腔注塑模具可单次生产96支注射笔组件,生产效...
2025-06-30